Si vous avez regardé les images haute résolution HiRISE de Mars Reconnaissance Orbiter, ou avez eu la chance d'explorer le nouveau Google Mars, vous savez que Mars regorge de cratères, de montagnes, de ravins et de toutes sortes de terrains intéressants - et dangereux - . De telles zones avec des dépôts en couches, des sédiments, des fractures et des failles ne sont que le type d'endroits où chercher les sources de méthane produites sur Mars. Mais il est beaucoup trop risqué d'envoyer notre style actuel de rovers, y compris le Mars Science Laboratory (MSL) 2011, sur un terrain dangereux. Mais les ingénieurs de JPL, ainsi que des étudiants du California Institute of Technology ont conçu et testé un robot polyvalent de faible masse qui pourrait être ajouté à de plus grands rovers comme MSL qui peuvent descendre en rappel des falaises, se déplacer agilement sur des terrains escarpés et rocheux et explorer cratères profonds.
Ce prototype de rover, appelé Axel, pourrait aider les futurs vaisseaux spatiaux robotisés à mieux explorer et explorer des mondes étrangers tels que Mars. Sur Terre, Axel pourrait aider aux opérations de recherche et sauvetage.
"Axel étend notre capacité à explorer des terrains que nous n'avons pas pu explorer dans le passé, tels que des cratères profonds avec des promontoires à pente verticale", a déclaré Issa A.D. Nesnas, chercheur principal d'Axel, de la section robotique et mobilité du JPL. «De plus, comme Axel est de masse relativement faible, une mission peut transporter un certain nombre de rovers Axel. Cela nous donnerait la possibilité d'être plus agressifs avec le terrain que nous explorerions, tout en gardant le risque global gérable. »
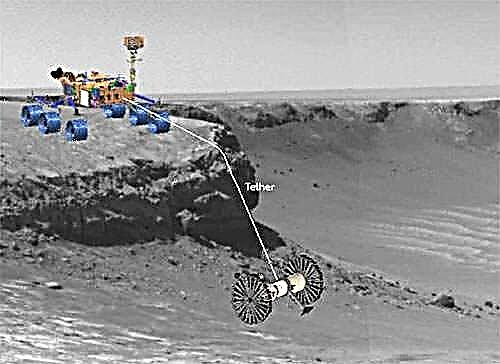
Nesnas a déclaré qu'Axel est comme un yo-yo - il est attaché à un rover plus grand et peut monter et descendre les côtés des cratères, des canyons et des ravins, explorant des régions non sûres pour d'autres rovers.

La conception simple et élégante d'Axel, qui peut fonctionner à la fois à l'envers et à droite, n'utilise que trois moteurs: un pour contrôler chacune de ses deux roues et un troisième pour contrôler un levier. Le levier contient un godet pour recueillir des matériaux lunaires ou planétaires à étudier par les scientifiques, et il ajuste également les deux caméras stéréo du robot, qui peuvent s'incliner à 360 degrés.

Le corps cylindrique d'Axel possède des capacités de calcul et de communication sans fil et un capteur inertiel pour fonctionner de manière autonome. Il possède également une attache qu'Axel peut dérouler pour descendre d'un atterrisseur, d'un rover ou d'un point d'ancrage plus grand. Le rover peut utiliser différents types de roues, des grandes roues pliables aux roues gonflables, ce qui aide le rover à tolérer un atterrissage dur et à gérer un terrain rocheux.
Axel est en développement depuis 1999, et des étudiants de Caltech, Purdue University et Arkansas Tech University ont collaboré avec JPL au fil des ans pour développer ce rover polyvalent.
Pour plus d'informations sur Axel, consultez la page Axel de JPL et le site Web Axel de Caltech.